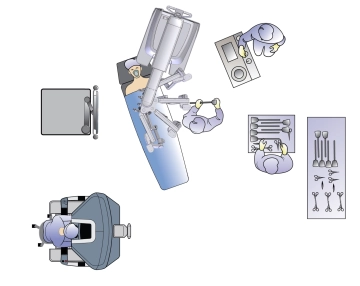
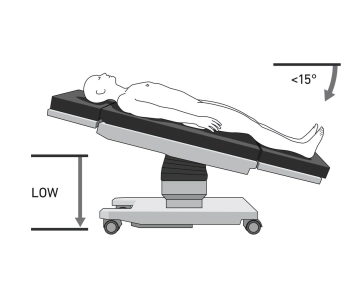
Se posiciona en decúbito supino sobre la gran almohada de vacío. El brazo izquierdo puede ser abducido. Gracias al uso de la almohada, se prescinde de todos los demás soportes. El asistente de mesa se sienta a la izquierda del paciente. La torre de vídeo se coloca a la derecha a la altura del tronco. La anestesia se encuentra en la cabeza de la paciente y el personal de enfermería de quirófano a la izquierda del asistente de mesa. El paciente se coloca antes del acoplamiento en posición anti-Trendelenburg de 15 grados
Precaución: El posicionamiento adquiere una importancia especial debido al acoplamiento del paciente al manipulador del robot. Riesgo de lesión de la pared abdominal en caso de deslizamiento del paciente.
Nota: Las almohadas de vacío pueden tener fugas. Verificar nuevamente antes de la cobertura estéril.