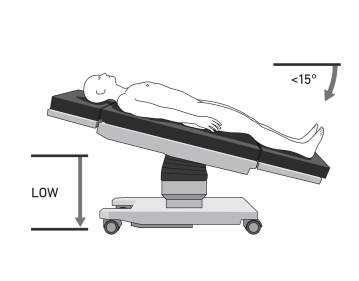
O paciente é posicionado em posição supina com uma leve posição de Trendelenburg reversa de aproximadamente 10-15 graus sobre o grande colchão a vácuo. O braço esquerdo é posicionado em um trilho de suporte de braço ao lado para manter a área cirúrgica livre e otimizar o acesso para a equipe cirúrgica e os braços robóticos. O uso do colchão a vácuo tipicamente elimina a necessidade de suportes adicionais, o que acelera a preparação.
Nota: O posicionamento preciso do paciente é crucial para o sucesso da cirurgia, pois garante o acesso ótimo dos braços robóticos aos locais cirúrgicos na cavidade abdominal e minimiza o risco de complicações.
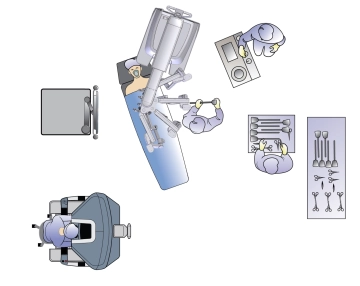
A equipe cirúrgica geralmente consiste em dois cirurgiões: o cirurgião do console, que controla o robô a partir de um console, e o assistente de mesa, que auxilia diretamente na mesa de operação. O assistente de mesa senta-se à esquerda do paciente. A torre de vídeo, que transmite as imagens da câmera robótica, é posicionada à direita na altura do tronco. A anestesia está localizada na cabeceira do paciente. A enfermeira de sala de cirurgia fica à esquerda do assistente de mesa.
Cuidado: O posicionamento correto é de particular importância devido ao acoplamento do paciente ao manipulador do robô. Posicionamento incorreto ou deslizamento do paciente durante a operação representa um risco significativo de lesão na parede abdominal pelos braços robóticos ou instrumentos. Portanto, uma verificação cuidadosa do posicionamento antes do início da operação é essencial.
Observação: Colchões a vácuo podem desenvolver vazamentos ao longo do tempo. Antes da cobertura estéril do paciente, a integridade do colchão a vácuo deve ser verificada novamente para garantir uma fixação segura e estável do paciente durante todo o procedimento. A manutenção regular dos colchões a vácuo também é recomendável.