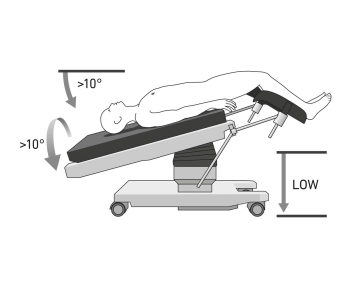
- Se posiciona en posición de litotomía idealmente sobre un gran cojín de vacío (en el lado derecho, el cojín soporta el arco costal y la cresta ilíaca, para que el peso del paciente en posición lateral derecha no presione el brazo.
- Se recomienda la fijación de ambos brazos (cuidado: envoltura de algodón al fijar mediante lazo de tela)
- También se realiza la envoltura de algodón de las rodillas y las partes proximales de las piernas inferiores, para evitar daños por presión.
- Para el posicionamiento de las piernas, se recomiendan las llamadas "swan-fins" o "boots" acolchados, para que las piernas puedan moverse por separado y cubiertas de forma estéril si es necesario. Alternativamente, el posicionamiento de las piernas puede realizarse en soportes para piernas con fijación de las piernas en estos.
- Las piernas también deberían poder flexionarse y extenderse durante el procedimiento mediante el control de la mesa de operaciones.
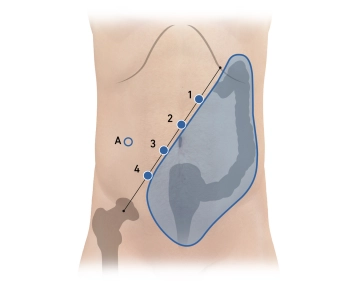
- Antes del lavado, siempre se realiza un examen rectal digital (ERD) o una rectoscopia, para asegurar que nada obstruya la colocación de la anastomosis peranal mediante un grapador circular.
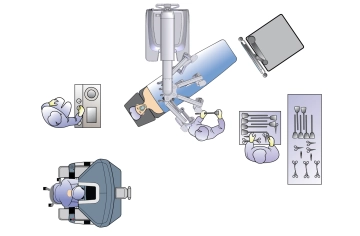
Observación: El posicionamiento adquiere una importancia especial debido al acoplamiento del paciente al manipulador del robot. También debe tenerse en cuenta el riesgo de lesiones en la pared abdominal si el paciente se desliza. Mediante mesas acopladas en el sistema Xi, es posible un cambio de posición intraoperatorio sin desacoplar. En ausencia de la tecnología "Table-Motion", el robot quirúrgico debe desacoplarse siempre antes de cualquier cambio de posición y retirarse de la mesa de operaciones.
Precaución: Los cojines de vacío pueden tener fugas. Por lo tanto, estos deben verificarse nuevamente antes de la cobertura estéril.