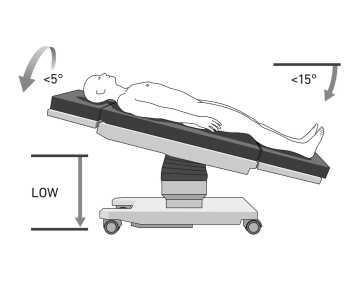
Gelagert wird in Rückenlagerung auf dem großen Vakuumkissen. Durch die Verwendung des Kissens entfallen alle weiteren Stützen. Die Extremitäten und alle druckgefährdeten Stellen werden gepolstert. Es empfiehlt sich ein Bügel zum Schutz des Patienten vor den Roboterarmen. Nach Einbringen der Trokare wird der Operationstisch in ca. 15°-Anti-Trendelenburg- und ca. 5°-Rechtsseiten-Lage (Tilt right) gekippt. Der Operationsroboter wird herangefahren und die Roboterarme angedockt.
Cave: Der Lagerung kommt wegen des Andockens des Patienten an den Manipulator des Roboters eine besondere Bedeutung zu. Verletzungsgefahr der Bauchdecke beim Abrutschen des Patienten.
Bemerkung: Vakuumkissen können Undichtigkeiten haben. Vor dem sterilen Abdecken nochmals überprüfen.
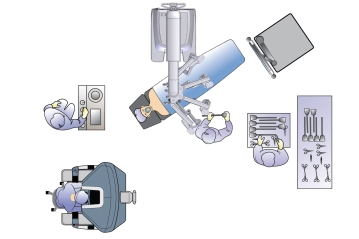
Folgendes Setup wird gewählt: Der Operateur sitzt an der Konsole idealerweise auch mit der Möglichkeit zum Patienten und Tischassistenten zu schauen. Der Tischassistent sitzt rechts vom Patienten. Die Anästhesie befindet sich am Kopf des Patienten. Der Patient Card wird von links an den Patienten herangefahren und die instrumentierende OP- Pflegekraft befindet sich rechter Hand des Tischassistenten