
- Posicionamento: Posição supina com pernas afastadas sobre um colchão a vácuo. O colchão garante estabilidade, reduzindo a necessidade de suportes adicionais
- Após a colocação do trocater, a mesa é inclinada para uma posição Anti-Trendelenburg de 15° – 30° para otimizar o acesso
- Acoplamento do Robô:
- O sistema Xi oferece flexibilidade na posição de acoplamento, tipicamente da esquerda
- Para sistemas X ou Si, o carrinho é acoplado cranialmente da direita
- Posicionamento da Equipe:
- Cirurgião: No console, idealmente com vista para o paciente e o assistente
- Assistente: Posicionado entre as pernas, sentado ou em pé
- Enfermeira de Campo: Do lado direito do paciente
- Anestesiologista: Na cabeça do paciente, do lado direito
-
Posicionamento do Paciente e Configuração da Sala de Operação
-
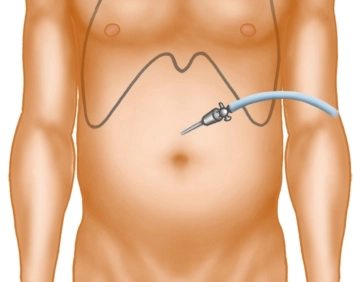
Pneumoperitônio, Colocação de Trocar e Acoplamento
![Pneumoperitônio, Colocação de Trocar e Acoplamento 1]()
![511_Trokarpositionen.jpeg]()
![Pneumoperitônio, Colocação de Trocar e Acoplamento 3]()
Configurações de som Criação de Pneumoperitônio:
- Use uma agulha de Veress no ponto de Palmer no abdome superior esquerdo.
- Estabeleça uma pressão de insuflação de 12–15 mmHg
- Alternativamente, empregue a técnica Optiview
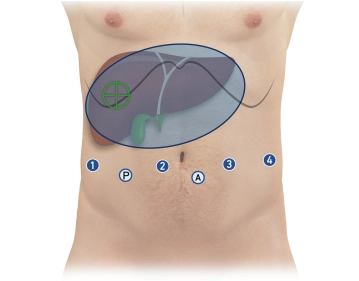
Colocação de Trocar:
- Portas Totais:
- Quatro portas robóticas de 8 mm em arranjo linear, 15–20 cm da anatomia alvo (infraumbilical)
- Dois trocateres laparoscópicos de 12 mm:
- Trocar assistente (caudal entre as portas robóticas 2 e 3)
- Trocar para manobra de Pringle (caudal entre as portas robóticas 1 e 2)
- Espaçamento: Aproximadamente 8 cm entre cada porta
- Posicione os trocateres robóticos no nível da parede abdominal muscular (alinhando o anel preto largo, o “Centro Remoto”)
Configuração Inicial de Instrumentos:
- Portas robóticas (da direita para a esquerda):
- Porta 1: Tesoura curva monopolar
- Porta 2: Câmera
- Porta 3: Pinça bipolar
- Porta 4: Pinça Prograsp
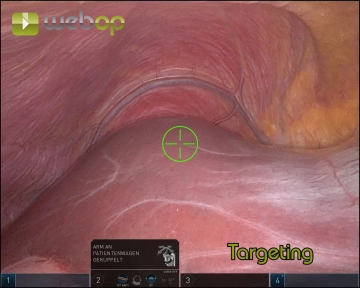
Acoplamento do Robô:
- Acople o braço da câmera primeiro (porta 2)
- Execute o Targeting (sistema Xi) para alinhar os braços do robô com o alvo cirúrgico
- Acople os braços restantes, garantindo espaçamento de 1 largura de punho entre eles
- Insira os instrumentos sob visualização direta via trocar assistente
Precauções e Dicas Principais
Estabilidade do Trocar:
- Garanta que o “Centro Remoto” se alinhe com a parede abdominal muscular para minimizar forças de cisalhamento durante o movimento do instrumento
Colocação de Instrumentos:
- Use o trocar assistente e a câmera para inspecionar o alinhamento do trocar e verificar o posicionamento do instrumento antes de prosseguir
Prevenção de Movimento do Paciente:
- Verifique duplamente o colchão a vácuo por vazamentos antes do drapejamento estéril
- Segure os braços durante o acoplamento para evitar lesões se o paciente se mover
Verificações de Controle:
- Antes do acoplamento:
- Marque os pontos de trocar e garanta espaçamento adequado
- Introduza a câmera manualmente para inspeção
- Após o acoplamento:
- Verifique o alinhamento dos braços e posicionamento dos instrumentos
-
Lista de Verificação Pré-Acoplamento
- Realize uma pequena incisão no abdome superior esquerdo para colocação da agulha de Veress
- Estabeleça pneumoperitônio a 15 mmHg
- Marque a linha do trocater e insira o primeiro trocater robótico
- Insira a câmera manualmente para confirmar o posicionamento
- Coloque sequencialmente:
- Três trocateres robóticos adicionais (8 mm)
- Dois trocateres laparoscópicos (12 mm) nas posições caudais
- Transição para posição Anti-Trendelenburg (15°)
- Acople o braço da câmera e insira a câmera
- Realize o Targeting com o sistema Xi
- Acople os três braços restantes
- Insira os instrumentos e posicione-os na anatomia alvo:
- Porta 1: Tesoura curva monopolar
- Porta 2: Câmera
- Porta 3: Pinça bipolar
- Porta 4: Pinça Prograsp
- Inspecione os centros remotos via trocater assistente para garantir alinhamento adequado
Esta abordagem sistemática otimiza a segurança do paciente, o posicionamento dos instrumentos e a utilização do robô, garantindo precisão na hemi-hepatectomia direita assistida por robô.
-
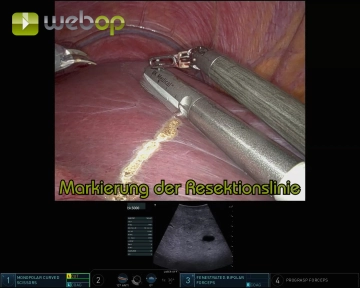
Sonografia Intraoperatória e Marcação da Linha de Ressecção
![Sonografia Intraoperatória e Marcação da Linha de Ressecção]()
Configurações de som Adesiólise:
- Liberar aderências entre o omento maior, vesícula biliar e superfície inferior do fígado
- Agarre o fundo da vesícula biliar com a Pinça Prograsp e retraia cranialmente
- Exponha toda a vesícula biliar até o infundíbulo
Ultrassom Intraoperatório:
- Insira a sonda de ultrassom através do trocater assistente
- Guie a sonda com pinças bipolares fenestradas para movimento preciso
- Objetivo:
- Visualize lesões e sua relação com vasos e ductos biliares
- Confirme o status livre de tumor do lobo hepático esquerdo
- Identifique marcos críticos, incluindo a veia hepática média e ramos segmentares para Segmentos V/VI e VIII
Marcação da Linha de Ressecção:
- Usando tesouras monopolares, marque a linha de ressecção na cápsula hepática ventral sob orientação de ultrassom
-
Divisão do Ligamento redondo e Ligamento falciforme do fígado
![Divisão do Ligamento redondo e Ligamento falciforme do fígado]()
Configurações de som Crie uma janela entre o ligamento redondo e a parede abdominal
Divida gradualmente ambos os ligamentos com coagulação meticulosa, progredindo de caudal para cranial até o diafragma e o ligamento coronário
- Dica: Use o ligamento redondo destacado como ponto de tração para manipulação atraumática do fígado durante o procedimento
-
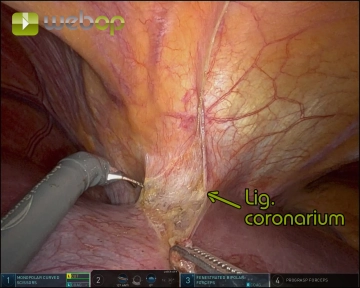
Exposição da veia cava inferior supra-hepática
![Exposição da veia cava inferior supra-hepática]()
Configurações de som Incisão e divisão do ligamento coronário anterior e exposição da confluência venosa hepática com a entrada das veias hepáticas na veia cava inferior.

Dissecção Hilar
Acesso e Exposição:Eleve o fígado usando as Pinças Prograsp no ligamento redondoAbra o omento menor
Acesso e Exposição:Eleve o fígado usando as Pinças Prograsp no ligamento redondoAbra o omento menor
Liberar agora e continuar aprendendo.
Liberação individual
Liberação deste conteúdo didático por 3 dias.
US$ 9,20
incl. IVA
Oferta mais popular
webop - Sparflex
Combine nossos módulos de aprendizado de forma flexível e economize até 50%.
a partir de US$ 4,26 / Módulo
US$ 51,22/ cobrança anual
Robótica
Todos os conteúdos didáticos deste módulo liberados.
US$ 8,53
/ Mês
US$ 102,50 / cobrança anual
A Webop é comprometida com o ensino. Por isso, oferecemos todo o nosso conteúdo também com uma tarifa justa para estudantes.