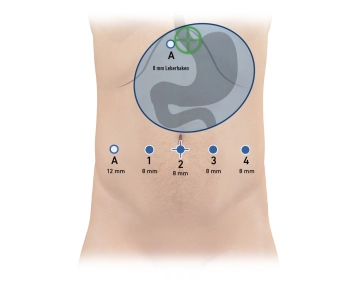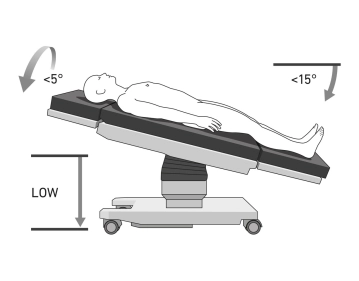
O paciente é posicionado em decúbito dorsal sobre o grande colchão a vácuo. O braço esquerdo pode ser posicionado separadamente. O uso do colchão elimina a necessidade de quaisquer suportes adicionais. As extremidades e todas as áreas sensíveis à pressão são acolchoadas. Recomenda-se uma barra para proteger o paciente dos braços robóticos. Após a inserção dos trocárteres, a mesa cirúrgica é inclinada aproximadamente 15° na posição anti-Trendelenburg e aproximadamente 5° para o lado direito (inclinação à direita).
Atenção: O posicionamento é de particular importância devido à ancoragem do paciente ao manipulador do robô. Há risco de lesão na parede abdominal se o paciente escorregar.
Nota: Os colchões a vácuo podem apresentar vazamentos. Verifique novamente antes da colocação dos campos estéreis.
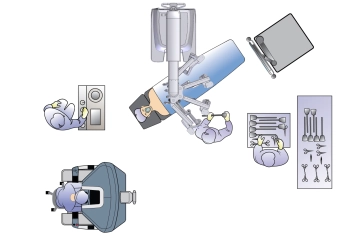
A seguinte configuração é escolhida: O cirurgião senta-se no console, idealmente com a capacidade de visualizar tanto o paciente quanto o assistente da mesa, que se senta à esquerda do paciente. A anestesia está localizada na cabeça do paciente. O carrinho do paciente é trazido ao paciente pelo lado cranial direito, e o enfermeiro cirúrgico instrumentador está localizado à direita do assistente da mesa.