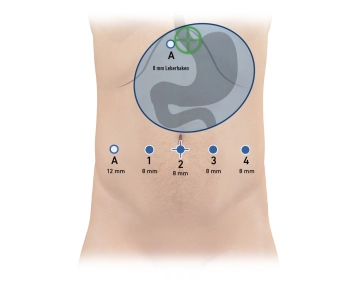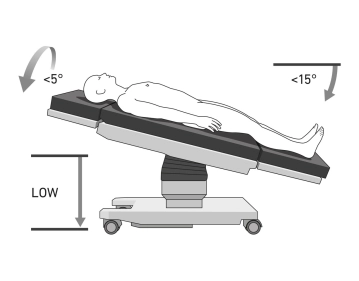
O paciente é posicionado em posição supina sobre o grande colchão a vácuo. O braço esquerdo pode ser posicionado para fora. Ao usar o colchão, todos os suportes adicionais são omitidos. As extremidades e todas as áreas sensíveis à pressão são acolchoadas. Recomenda-se um aro para proteger o paciente dos braços do robô. Após a inserção dos trocartes, a mesa cirúrgica é inclinada para aprox. 15°-anti-Trendelenburg e aprox. 5°-posição lateral direita (Inclinação à direita).
Cuidado: O posicionamento é de particular importância devido ao acoplamento do paciente ao manipulador do robô. Risco de lesão na parede abdominal se o paciente escorregar.
Nota: Colchões a vácuo podem ter vazamentos. Verifique novamente antes da cobertura estéril.
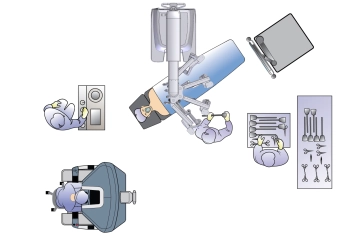
A seguinte configuração é escolhida: O cirurgião senta-se no console idealmente também com a possibilidade de olhar para o paciente e o assistente de mesa, o assistente de mesa senta-se à esquerda do paciente. A anestesia está localizada na cabeça do paciente. O carrinho do paciente é aproximado do lado direito cranial ao paciente e a enfermeira instrumentadora da SO está localizada à direita do assistente de mesa